相對論和張量分析 – Coordinate Covariant, Contravariant, Invariant (座標系協變,逆變,不變)
by allenlu2007
黎曼微分幾何是廣義相對論的數學基礎。張量分析是黎曼微分幾何的必備數學工具。
- 黎曼幾何是彎曲幾何(curved geometry),不同於歐式平直幾何(straight geometry)。
- 黎曼幾何研究內稟(intrinsic)的特性以及嵌入(embedded)歐式幾何的特性。例如 2D Swiss Roll 的內稟幾何特性和一張平紙無異 (i.e. intrinsic curvature = 0), 但是 embedded 在高維(3D)歐式空間卻有曲率。
由於相對論的影響,不同(運動)觀察者所量測的物理定律 (e.g. least action principle) 都要一樣。這剛好對應幾何不同座標系的“不變性”。不變的 scalar 可以使用 invariant. 不變的 vector/tensor, 因為分量仍然和座標系相關,我們用 covariant 表述。
觀察者和座標系容易混淆的重點:
-
不同(運動)觀察者對應幾何不同座標系. 不要執著一個是動態,一個是靜態。這裏所說的幾何座標系都包含時間軸 (
-axis), 從下到上代表過去到未來。任何運動都可以用一條靜態的世界線(worldline) 表示。
-
一條 wordline 是相對於一個觀察者(座標系)。例如 A 觀察到一個靜止物體 S,在 A 的(直角)座標系 S 的位置就是一條垂直的 world line. B 是一個相對 A 定速
移動的觀察者。B 要如何得到 S 的 world line?
有兩個方法:
(i) B 創造自己的(直角)座標系以及 S 的 world line. 顯然在 B 的直角座標系 S world line 是一條斜線。斜率是
(assuming
). 兩個不同的直角座標系 for S 運動,對應 A 和 B 觀察者 (observer oriented)。這不是我們所要的。如果有無窮多觀察者(等速或等加速觀察者)就需要無窮多直角座標系以及無窮多的 world lines for the same S 的運動。
我們關心 S 的運動 (object oriented) 一次看到 A 和 B 座標系的詮釋,見 (ii). 這對廣義相對論研究時空內稟幾何特性很重要。(ii) 在 A 的直角座標系 (grid line) 重劃 B 的(非直角)座標系 (grid line)。同一條垂直的 world line, 在 A 座標系 grid line 是靜止;但在 B 座標系 grid line 則是運動。
-
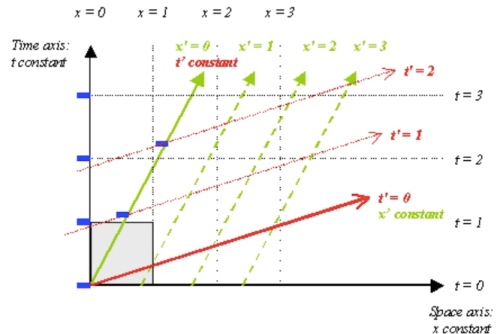
下圖是一個例子。A 觀察者是直角座標系
, 網格線 (grid line) 是正方形。但對 B 觀察者(相對速度為
, 網格線是平行四邊形。此處是用 Lorentz 變換,所以
格線是斜線。如果是 Galilean 變換,
垂直線。對 B 座標系
而言,
-
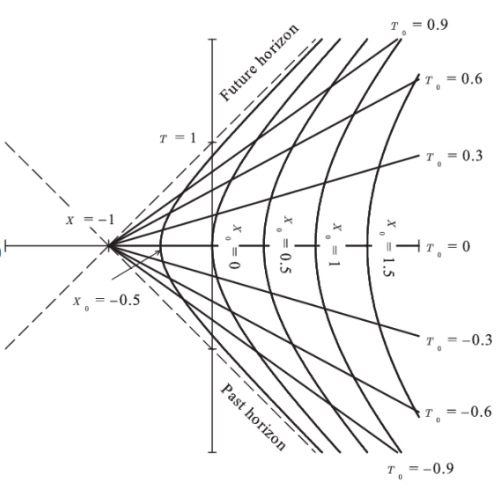
注意這種重劃座標系網格並不限於相對速度固定的觀察者。原則上適用任何運動觀察者。假設觀察者 C 是相對于 A 有固定等加速度。也可以定義
網格線。下圖是 Lorentz 變換 C 的座標系。
變成雙曲線。
變成聚集在
的投射線 (假設光速=1). 網格線變成更奇怪的四邊形。注意在 Lorentz transform 所有速度無法超越光速。觀察者 C 無法持續加速超越光速。 Galilean 變換 C 的座標系則不同。
回到物理和幾何的對照:
- 運動的物體
幾何的一條世界線 C (不是面或其他形狀)
- 不同慣性運動或是非慣性運動觀察者
- 狹義相對論:物理定律在不同慣性座標系不變 (scalar:invariant; vector/tensor:covariant)
- 廣義相對論:物理定律考慮等效原理在不同座標系不變
-
物理定律
-
微分幾何的 1st fundmental form
幾何量是微分弧長 coordinate invariant 對應物理的 Lorentz transform. 如果少了
就是 (-1)*Galilean transform.
-
注意微分幾何的 1st fundamental form 可以推廣到 curved space or coordinate. 這裏使用愛因斯坦 summation notation.
-
牛頓第二定律:
在 Galilean transform 不變。因為是 vector, vector components 在不同座標系不同,稱為 covariant. 對應的幾何不變量是“curvature vector". 但在 Lorentz transform,
甚至不是 4-vector/tensor, 連 covariant 也不是。如何得到符合 Lorentz tranform 4-vector/tensor 的力學定律呢?下面描述。
-
最小作用力原理 (Least action principle) 是比牛頓運動定律更基本的定理。分析力學首先找到 Lagrangian
(單位是能量),differential action
(單位是能量*時間,大自然兩者都要省)。Total action 就是空間兩點
和時間兩點
路徑積分。最小作用原理用變分法找到最小
的路徑。
-
舉一個例子:古典力學 Lagrangian of free particle (no potential field) in Cartesian and polar coordinate. [@ActionPhysics2019]
$latex L =\frac{1}{2} m v^2=\frac{1}{2} m (\dot{x}^2 + \dot{y}^2)
\quad L =\frac{1}{2} m (\dot{r}^2 + r^2 \dot{\varphi}^2) $ -
最小作用原理推廣到 4D 時空 for two events
and
. 因為時間
, 需要用 dummy variable
. 上述的
-
但在相對論力學 4D 時空的 Lagrangian of free particle (no potential field). [@RelativisticLagrangian2019]
沒有單位。根號的單位是速度,和光速
單位抵銷。
的單位是能量。所以
是 1st fundmental form 的根號,或是微分弧長。滿足 Lorentz transform invariant. In a word,
重點是 S (action) 對應的是 4D 時空兩點之間的總弧長 (with a proportional constant). 最小作用原理對應幾何量是兩點之間最短距離的弧線,稱為 geodesic (測地線或地直線) which is coordinate invariant. [@cyrilGeodesicEquation2018] 也就是說,不同慣性運動的觀察者的最小作用原理都是一樣。但如何推廣到非慣性觀察者?
-



UTM. 2018. “Proper Time, Coordinate Systems, Lorentz Transformations | Internet Encyclopedia of Philosophy.” 2018. https://www.iep.utm.edu/proper-t/.
Coordinate Invariant, Covariant, Contravariant
Coordinate invariant 基本是 scalar quantity or field, 例如
Contravariance 基本是 vector/tensor, 例如 curvature tensor, …. 什麼是 contravariant? 


Covariance 也是 vector/tensor, 為什麼是 covariance? 一個例子是 gradient of scalar field. 

Covariance and Contra-variance of Vector/Tensor
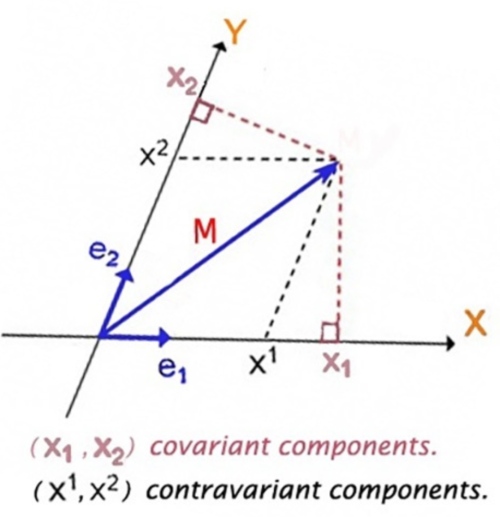
歐式空間(或是 tangent space on manifold)
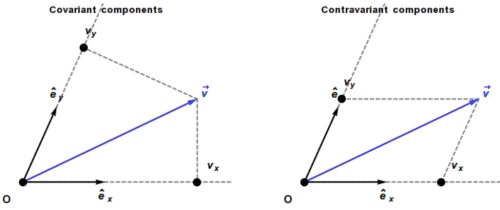
如何在座標系表達一個向量 
選擇一組 basis vectors (假設不正交). 然後分解成 basis vectors 的平行分量 (下圖右 typo 

我們稱 



問題是如何用數學式計算
如果是在直角座標系如下,可以看出 contra-variant!

顯然在非直角座標系是錯的!正確的數學表述在後面。
此時稱

下一個問題,是否還有其他方法表示一個向量?Yes!
我們可以用垂直投影分量表示一個向量 (下圖左, 
我們稱 



問題是如何找到對應的 (cotangent) basis vector 
為了滿足 


也就是說 

注意 

此時可以用新的 (cotangent) basis vector 表示:



因為 



Inner Product Using Einstein Notation

Scalar field is invariant.
Vector/tensor field is contravariant.
Gradient of scalar field is a vector field, which is co-variant.
為了直觀了解 curved coordinate and space, 用以下的順序理解:直角座標系
-
orthonormal 座標系
-
scaled 座標系
-
Non-orthogonal 座標系
-
Polar 座標系







三維空間
推廣上述二維的垂直觀念到三維空間。





同理 
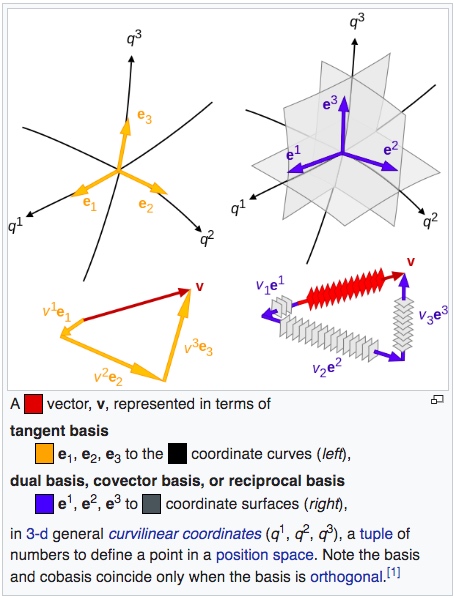
推廣到 n 維空間:
Tangent basis: e1, e2, …, en, C(n,1)=n
Reciprocal basis: e1.,… C(n, n-1) = n
Curved Space or Coordinate System
Basis Vector
Reciprocal Basis Vector





Covariant Derivative of Scalar Field and Vector Field
Covariant derivative 是 directional derivative 的推廣。同樣用以下的順序理解:直角座標系
-
Scalar field:
on orthonormal 座標系
-
Scalar field:
-
Scalar field:
on 極座標系
,
,
.
,
,
$latex \nabla f(r,\theta) = \frac{\partial f}{\partial r} e^r + \frac{\partial f}{\partial \theta} e^\theta \quad\text{(1- form, covariant)}\\
= \frac{\partial f}{\partial r} e_r + \frac{1}{r^2}\frac{\partial f}{\partial \theta} e_\theta \qquad\text{(contra-variant)} $另外常見的表示法是 Euclidean metric, normalized form,
:






一個純量場(0階張量)的梯度, 
一個一維量場的梯度,
重新回到物理和幾何的對照
- (三維空間 + 一維時間): 滿足 Galilean tranform.
, 最小作用原理~?。
- 四維時空:滿足 Lorentz tranform. 最小作用原理
- (n-維空間 + 一維時間):多粒子運動。constrain 變為 manifold. Tangent space (contra-variant basis): Lagrangian mechanics. Cotangent space (co-variant basis): Hamiltonian mechanics. How to expand this?
Reference
Wiki. 2019. “Covariance and Contravariance of Vectors.” In Wikipedia.
https://en.wikipedia.org/w/index.php?title=Covariance\_and\_contravariance\_of\_vectors&oldid=904269873
“Action (Physics).” 2019. Wikipedia.
https://en.wikipedia.org/w/index.php?title=Action_(physics)&oldid=904671703
Cyril. 2018. “Geodesic Equation from the Principle of Least Action.” September 18, 2018.
http://einsteinrelativelyeasy.com/index.php/general-relativity/97-geodesic-equation-from-the-principle-of-least-action.
“Relativistic Lagrangian Mechanics.” 2019. Wikipedia.
https://en.wikipedia.org/w/index.php?title=Relativistic_Lagrangian_mechanics&oldid=884947845
Appendix
Example 1: 牛頓空間以及不同慣性運動觀察者
- 3D 歐式空間 + 1D 時間 (空間時間各自獨立,互不影響)
- 不同慣性觀察者:
座標系。為了簡化在 2D plan,只考慮
- 靜止在原點的物體。它的 world line 是一條垂直線
- 對應座標轉換:x' = constant grid line 變成斜線,斜率由速度決定
- 物理定律不變 (invariant):



Example 2: 狹義相對論慣性運動觀察者
- 空間:4D 閔式幾何 (Minkovsky space-time 4D space)
- 運動方程式:least action principle <-> geodesic
- 不同慣性觀察者: y = x – v*t
Example 2: 廣義相對論
